|
I am a Ph.D. student in the College of Computer Science and Technology at Zhejiang University, advised by Prof. Jianke Zhu. Prior to that, I obtained my B.Eng. at Zhejiang University, supervised by Prof. Zhiwei Xu and Prof. Hangfang Zhao. And now, I am also a visiting Ph.D. student @ xML-Lab, National University of Singapore, co-advised by Prof. Xinchao Wang. I have broad research interests in computer vision and machine learning. My current research focuses on: Various forms of academic collaboration and discussion are welcome. Feel free to reach out! |

|
|
* indicates equal contribution |
|
|
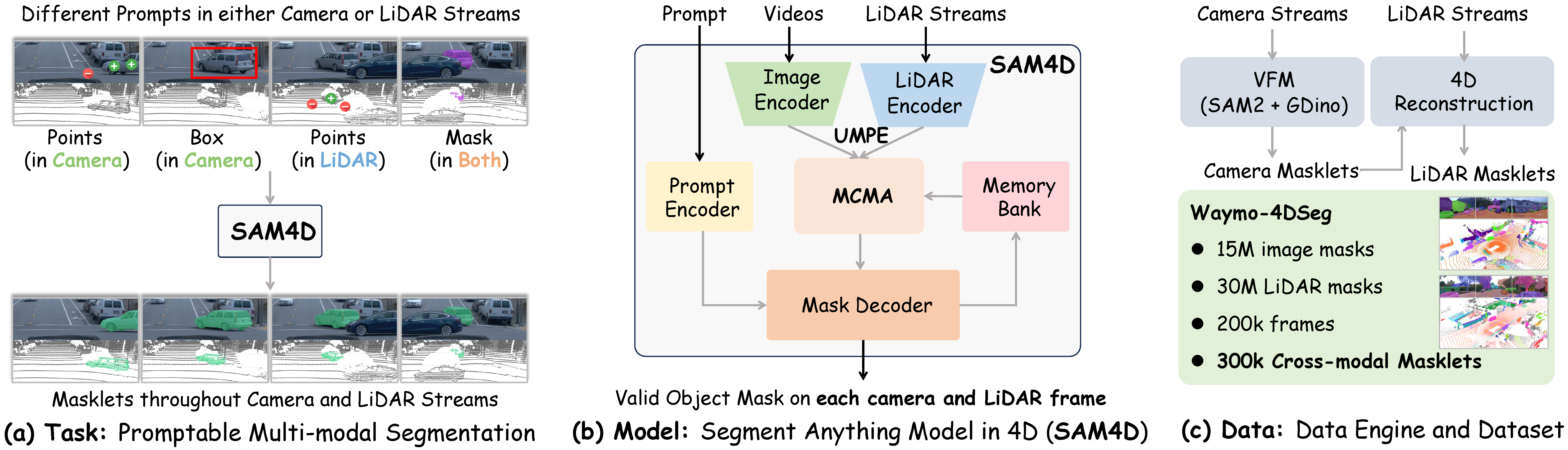
Song Wang, Gongfan Fang, Lingdong Kong, Xiangtai Li, Jianyun Xu, Sheng Yang, Qiang Li, Jianke Zhu, Xinchao Wang arXiv, 2025 [arXiv] [Code] [Project Page] |
|
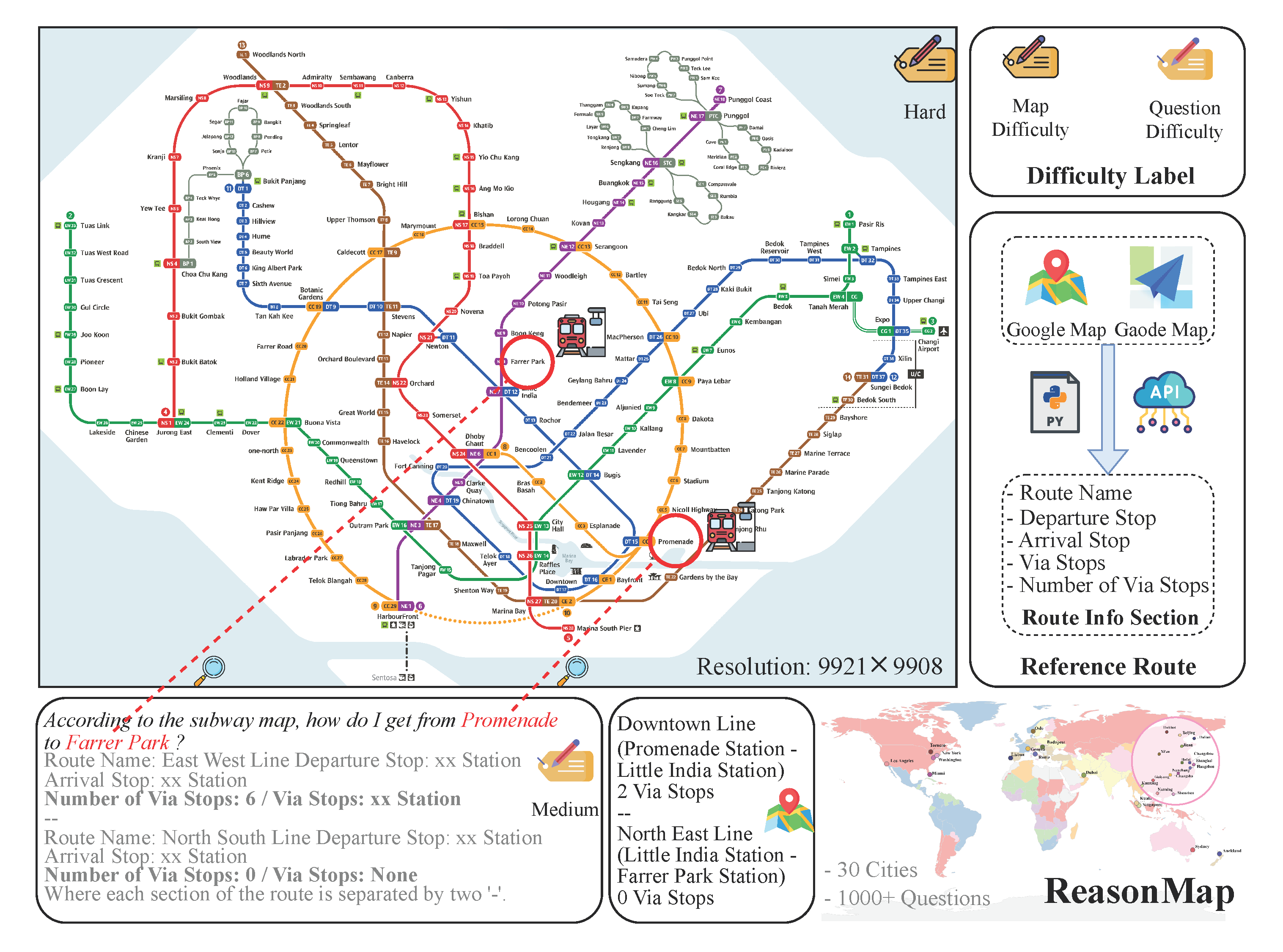
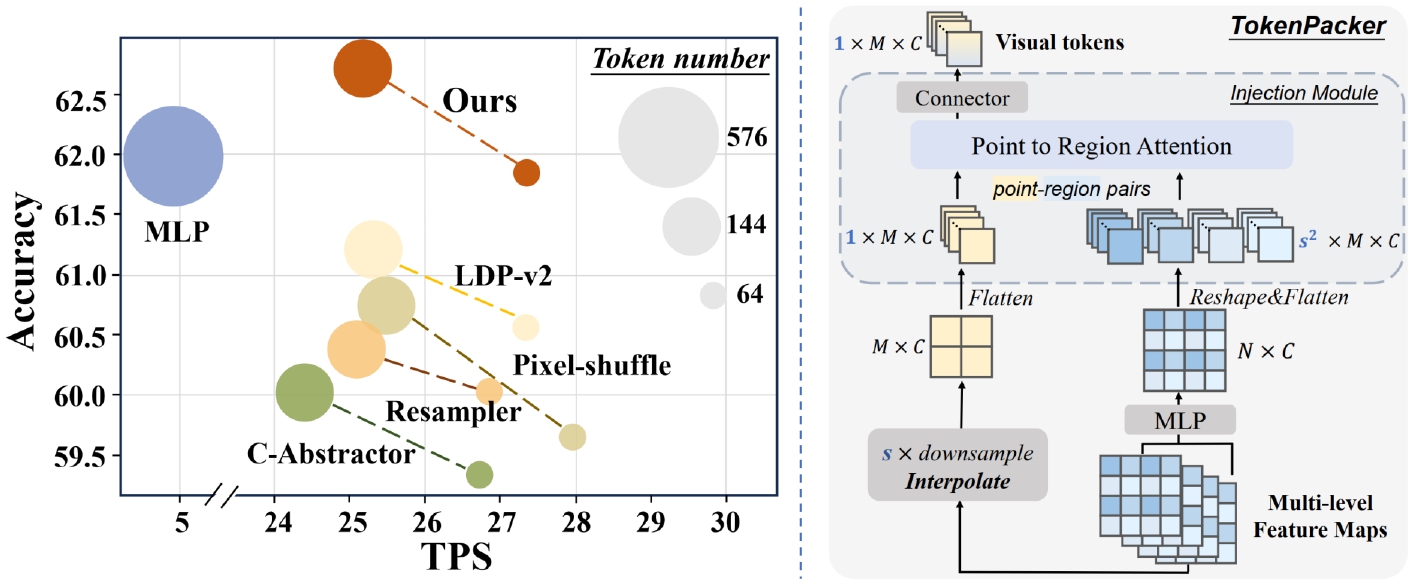
Sicheng Feng*, Song Wang*, Shuyi Ouyang, Lingdong Kong, Zikai Song, Jianke Zhu, Huan Wang, Xinchao Wang arXiv, 2025 [arXiv] [Code] [Project Page] [中文解读] |
|
Jianyun Xu*, Song Wang*, Ziqian Ni*, Chunyong Hu, Sheng Yang, Jianke Zhu, Qiang Li IEEE/CVF International Conference on Computer Vision (ICCV), 2025 [arXiv] [Code] [Project Page] |
|
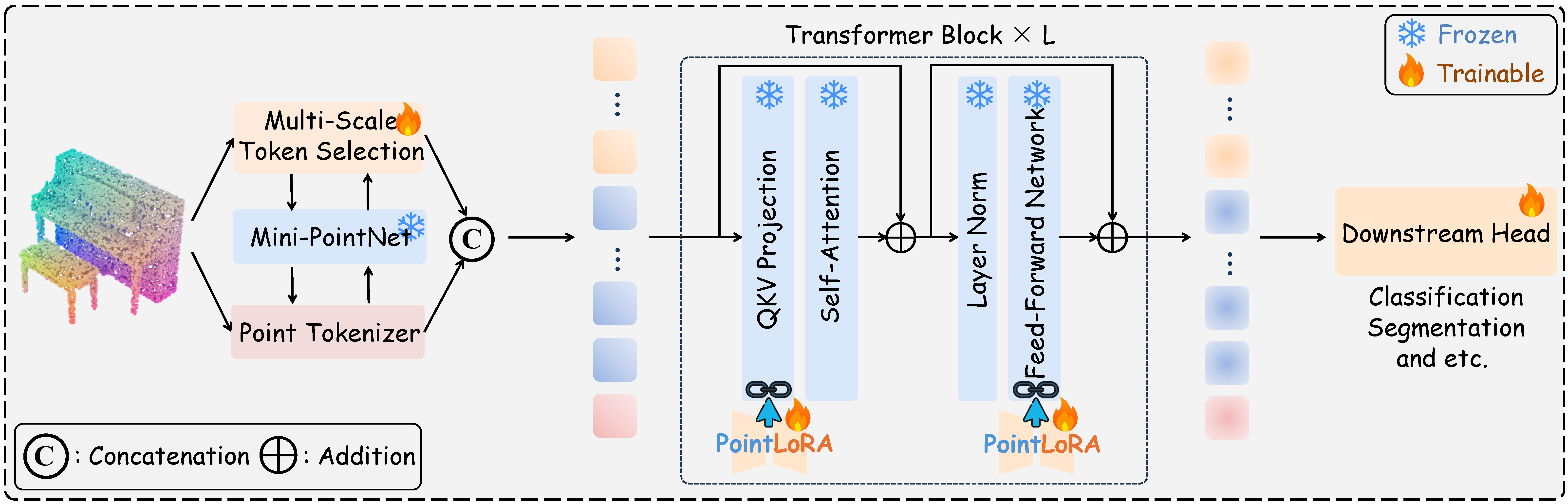
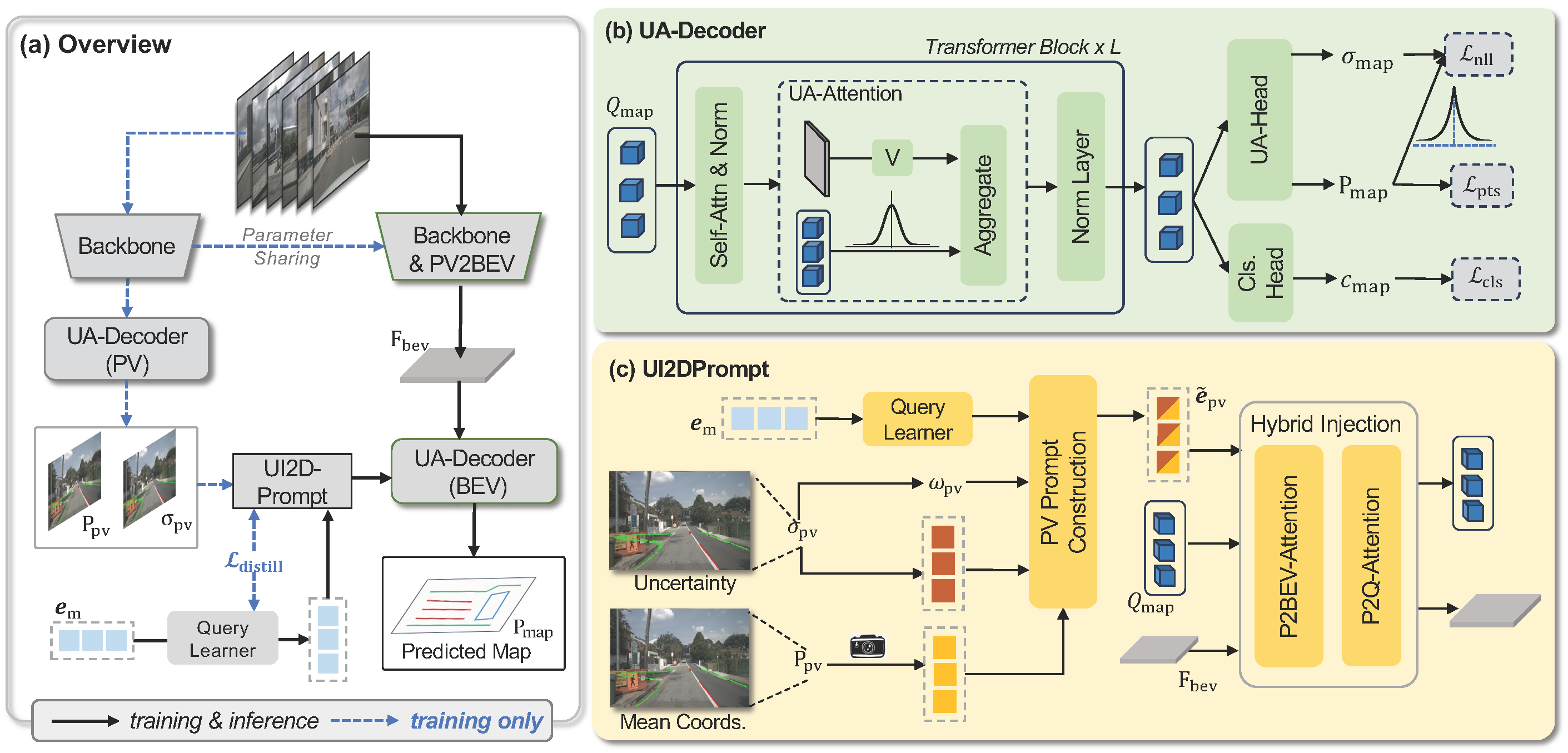
Song Wang, Xiaolu Liu, Lingdong Kong, Jianyun Xu, Chunyong Hu, Gongfan Fang, Wentong Li, Jianke Zhu, Xinchao Wang IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 [arXiv] [Code] |
|
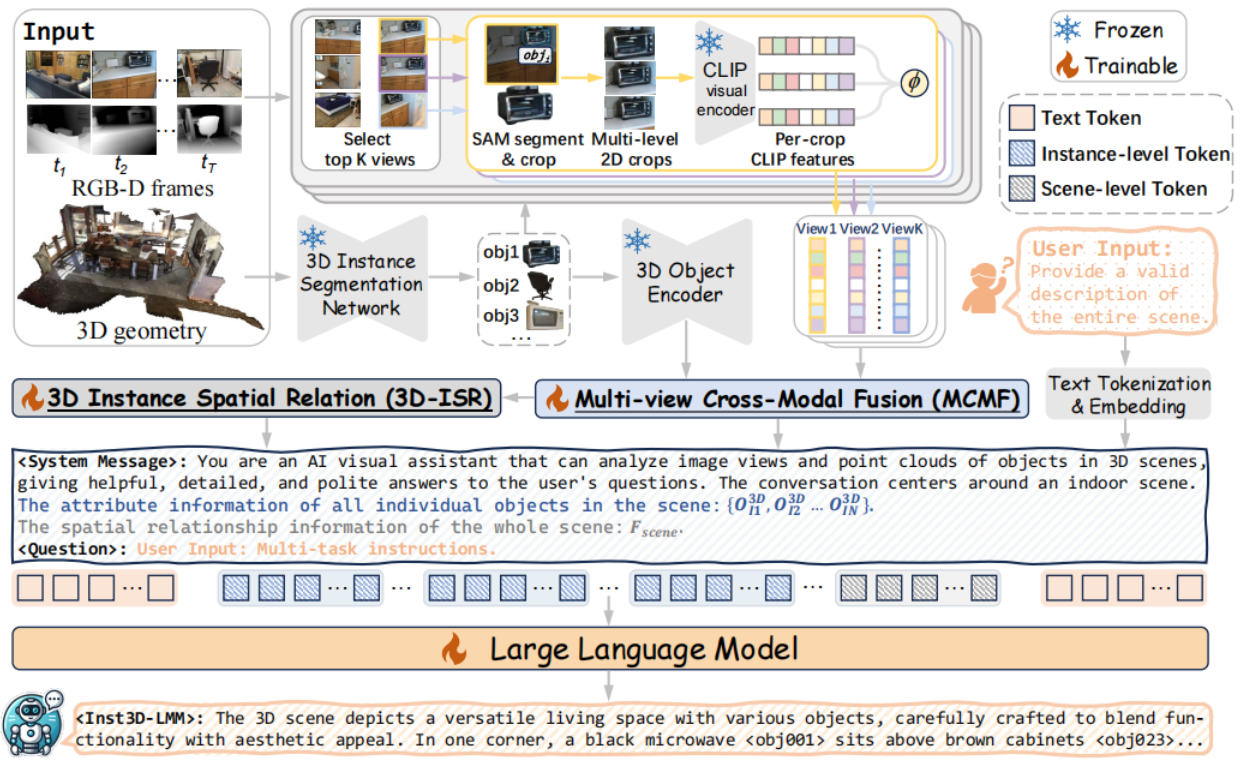
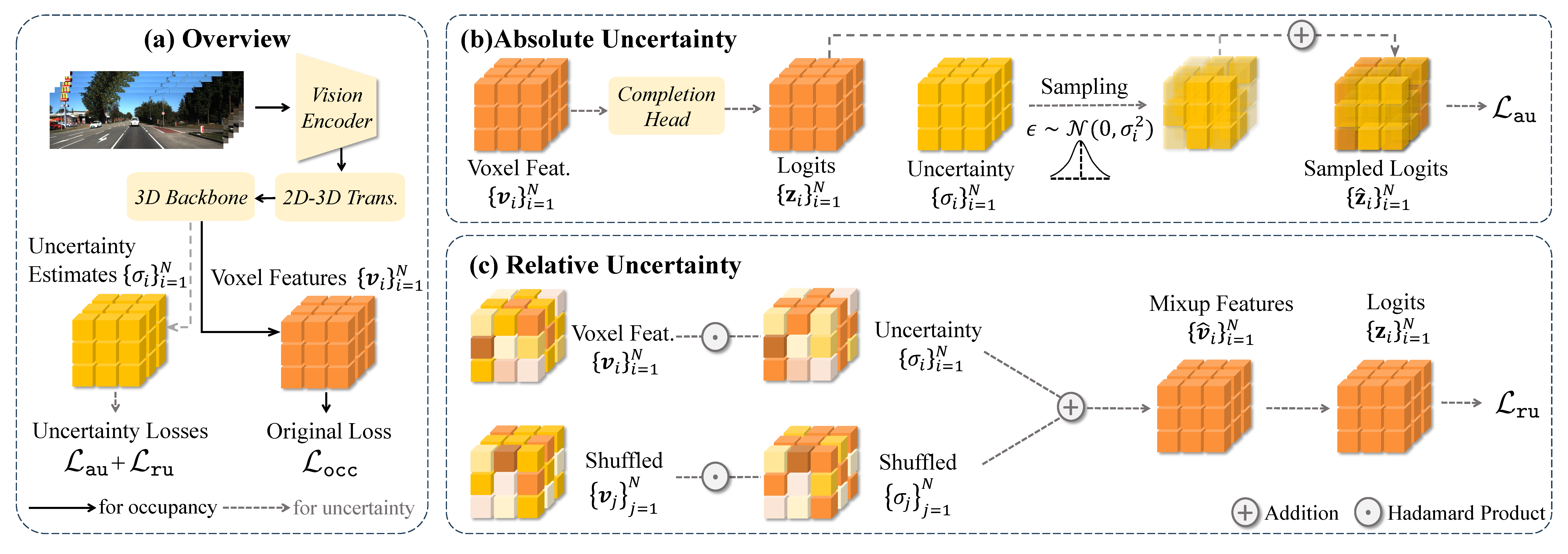
Hanxun Yu*, Wentong Li*, Song Wang, Junbo Chen, Jianke Zhu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR Highlight), 2025 [arXiv] [Code] |
|
Xiaolu Liu*, Ruizi Yang*, Song Wang, Wentong Li, Junbo Chen, Jianke Zhu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 [arXiv] [Code] |
|
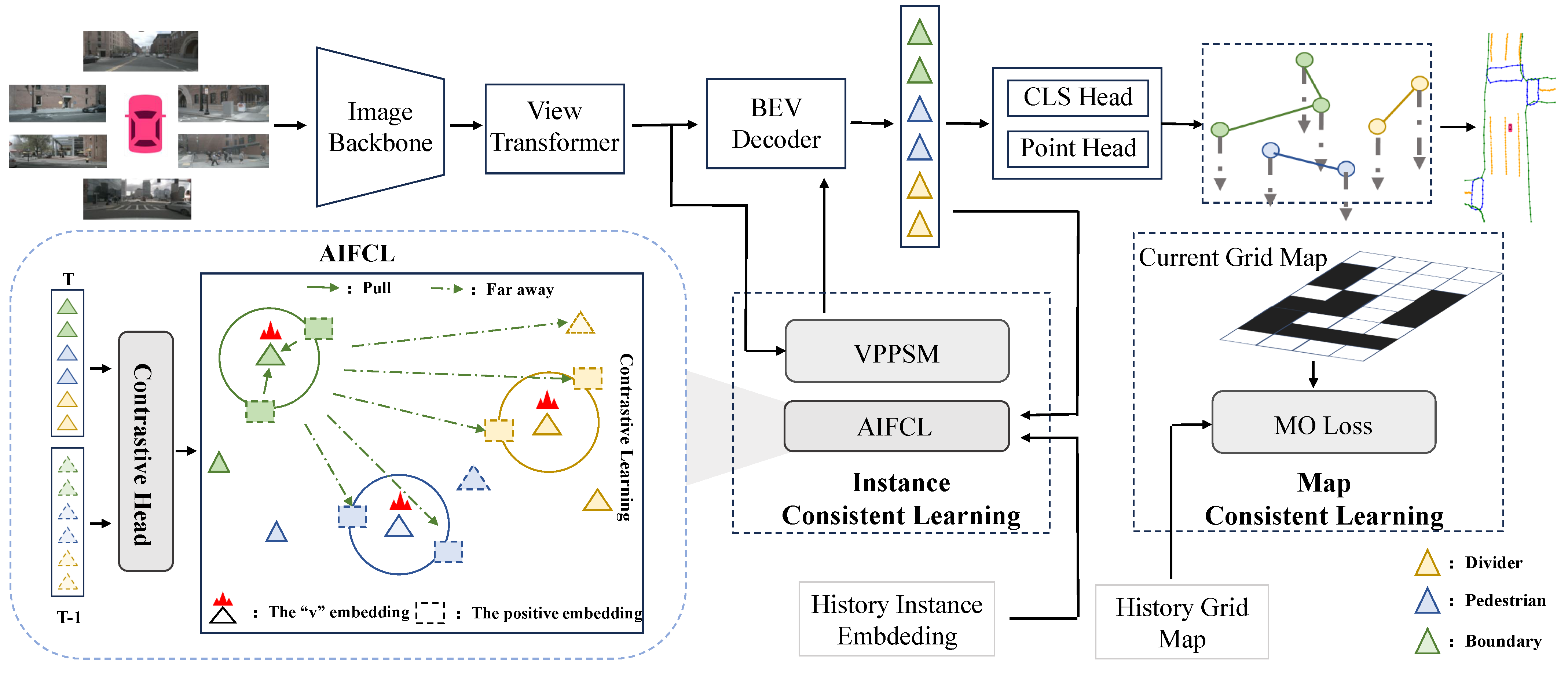
Song Wang, Zhongdao Wang, Jiawei Yu, Wentong Li, Bailan Feng, Junbo Chen, Jianke Zhu International Joint Conference on Artificial Intelligence (IJCAI), 2025 [arXiv] [Code] |
|
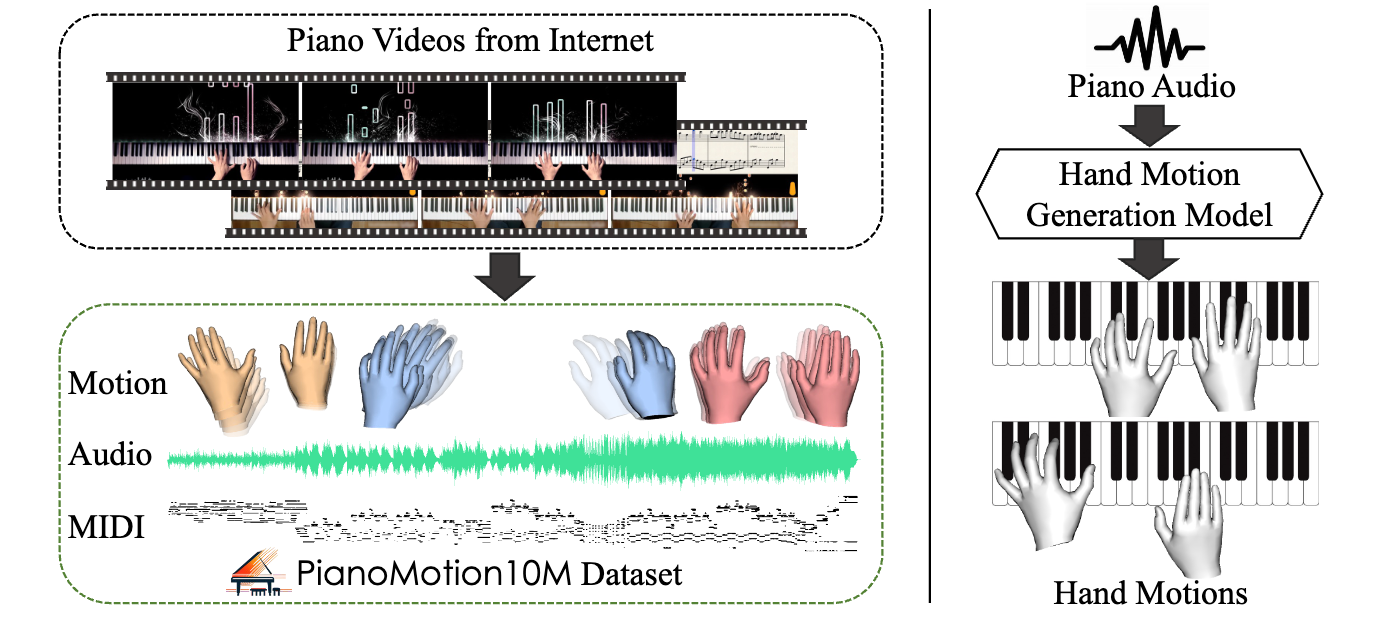
Qijun Gan, Song Wang, Shengtao Wu, Jianke Zhu International Conference on Learning Representations (ICLR Spotlight), 2025 [arXiv] [Code] |
|
Wentong Li*, Yuqian Yuan*, Jian Liu, Dongqi Tang, Song Wang, Jie Qin, Jianke Zhu, Lei Zhang International Journal of Computer Vision (IJCV), 2025 [arXiv] [Code] |
|
Hao Shi*, Song Wang*, Jiaming Zhang, Xiaoting Yin, Zhongdao Wang, Zhijian Zhao, Guangming Wang, Jianke Zhu, Kailun Yang, Kaiwei Wang IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2025 [arXiv] [Code] |
|
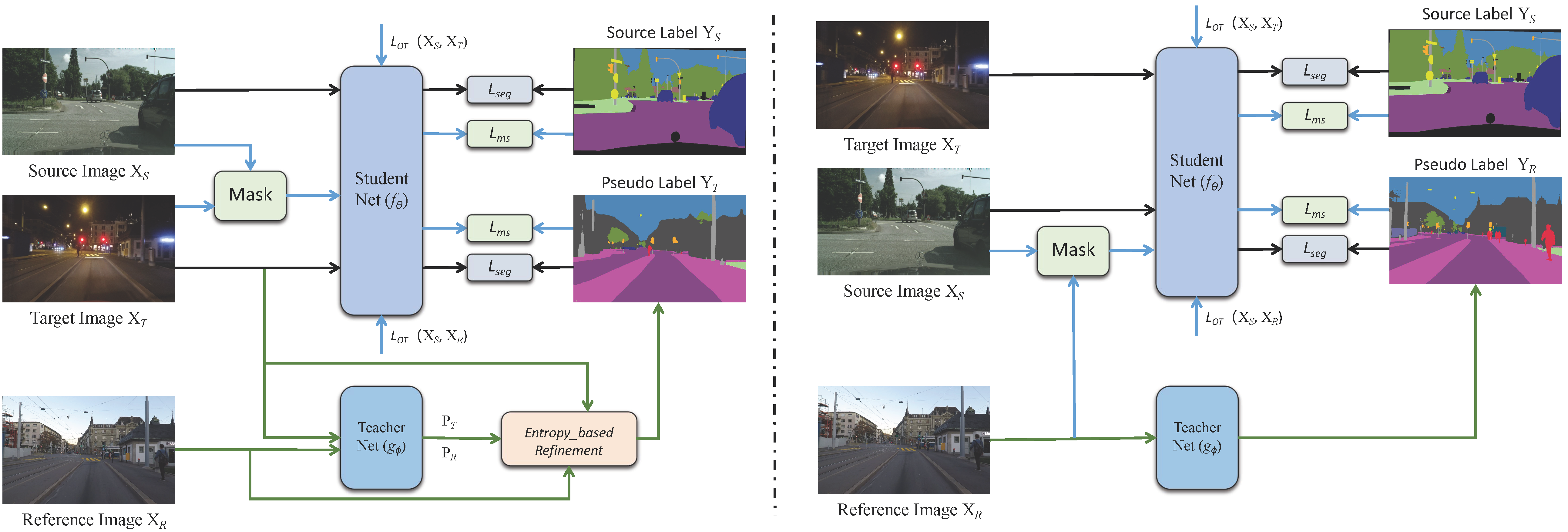
Song Wang, Jiawei Yu, Wentong Li, Hao Shi, Kailun Yang, Junbo Chen, Jianke Zhu International Joint Conference on Artificial Intelligence (IJCAI), 2024 [arXiv] [Code] |
|
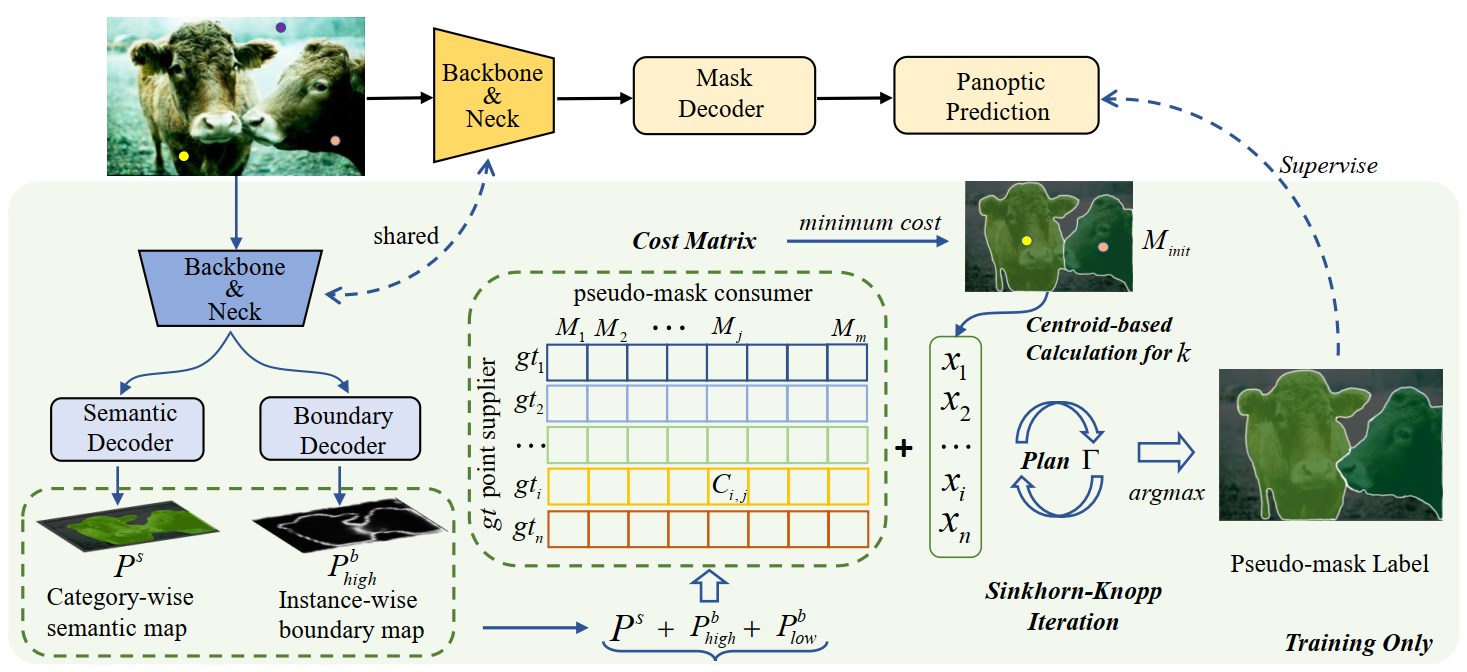
Song Wang, Jiawei Yu, Wentong Li, Wenyu Liu, Xiaolu Liu, Junbo Chen, Jianke Zhu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 [arXiv] [Code] |
|
Xiaolu Liu, Song Wang, Wentong Li, Ruizi Yang, Junbo Chen, Jianke Zhu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 [arXiv] [Code] |
|
Wenyu Liu, Song Wang, Jianke Zhu, Xuansong Xie, Lei Zhang IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2024 [Paper] [Code] |
|
Siyu Li, Jiacheng Lin, Hao Shi, Jiaming Zhang, Song Wang, You Yao, Zhiyong Li, Kailun Yang IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2024 [arXiv] [Code] |
|
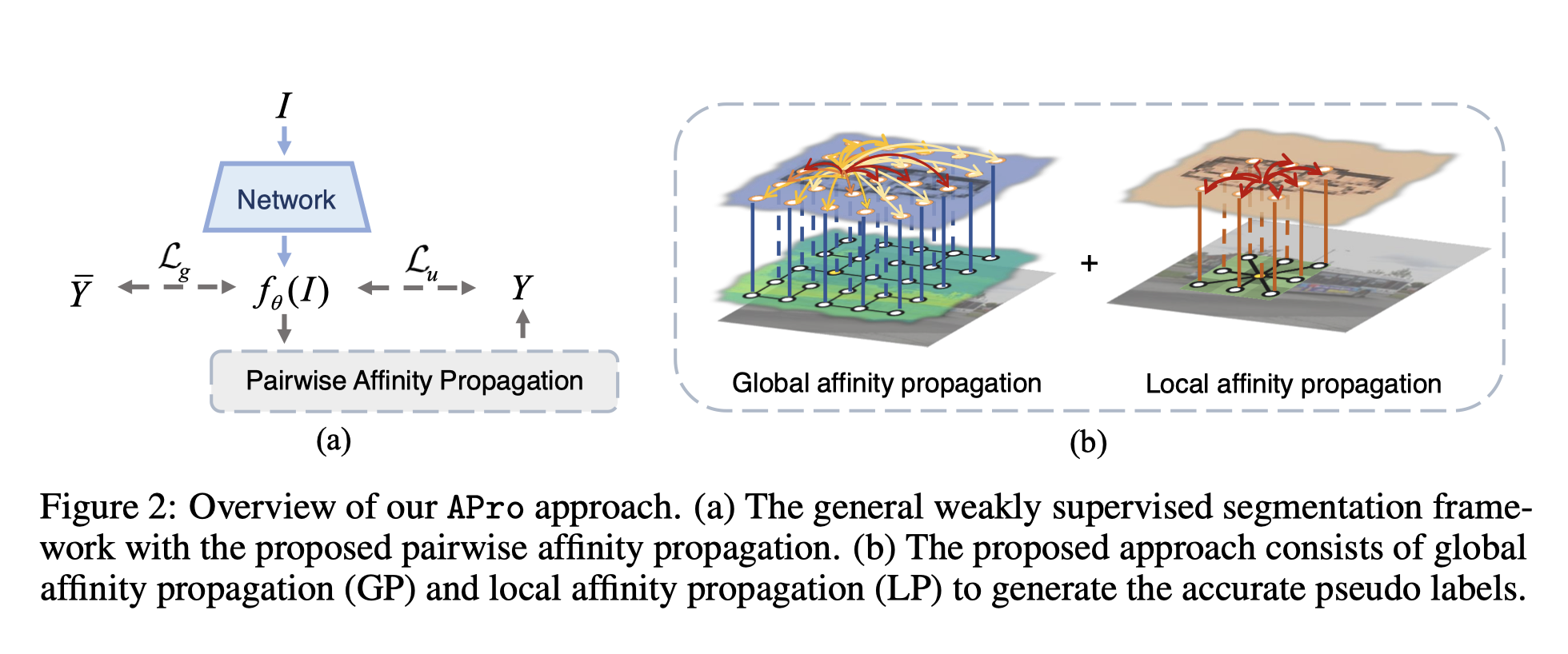
Wentong Li*, Yuqian Yuan*, Song Wang, Wenyu Liu, Dongqi Tang, Jian Liu, Jianke Zhu, Lei Zhang Conference on Neural Information Processing Systems (NeurIPS), 2023 [arXiv] [Code] [Project Page] |
|
Wentong Li, Yuqian Yuan, Song Wang, Jianke Zhu, Jianshu Li, Jian Liu, Lei Zhang IEEE/CVF International Conference on Computer Vision (ICCV), 2023 [arXiv] [Code] |
|
Song Wang, Wentong Li, Wenyu Liu, Xiaolu Liu, Jianke Zhu IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023 [arXiv] [Code] |
|
Song Wang, Jianke Zhu, Ruixiang Zhang IEEE Robotics and Automation Letters (RA-L with IROS, IF: 5.2), 2022 [arXiv] [Code] |
|
|
|
|
|
|
© Song Wang | Last updated: June 28, 2025